|
|

|

|
| e-Pub |
Section: New Results
Bayesian Perception
Participants : Christian Laugier, Lukas Rummelhard, Amaury Nègre [Gipsa Lab since June 2016] , Jean-Alix David, Julia Chartre, Jerome Lussereau, Tiana Rakotovao, Nicolas Turro [SED] , Jean-François Cuniberto [SED] , Diego Puschini [CEA DACLE] , Julien Mottin [CEA DACLE] .
Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT)
Participants : Lukas Rummelhard, Amaury Nègre, Christian Laugier.
The research work on Bayesian Perception has been done as a continuation and an extension of some previous research results obtained in the scope of the former Inria team-project e-Motion and of the more recent developments done in 2015 in the scope of the Chroma team. This work exploits the Bayesian Occupancy Filter (BOF) paradigm [42], developed and patented by the team several years ago (The Bayesian programming formalism developed in e-Motion, pioneered (together with the contemporary work of Thrun, Burgards and Fox [94]) a systematic effort to formalize robotics problems under Probability theory –an approach that is now pervasive in Robotics.). It also extends the more recent concept of Hybrid Sampling BOF (HSBOF) [76], whose purpose was to adapt the concept to highly dynamic scenes and to analyze the scene through a static-dynamic duality. In this new approach, the static part is represented using an occupancy grid structure, and the dynamic part (motion field) is modeled using moving particles. The HSBOF software has been implemented and tested on our experimental platforms (equipped Toyota Lexus and Renault Zoe) in 2014 and 2015; it has also been implemented in 2015 on the experimental autonomous car of Toyota Motor Europe in Brussels.
The objective of the research work performed in the period 2015-16 was to overcome some of the shortcomings of the initial HSBOF approach (In the current implementation of the HSBOF algorithm, many particles are still allocated to irrelevant areas, since no specific representation models are associated to dataless areas. Moreover, if the filtered low level representation can directly be used for various applications (for example mapping process, short-term collision risk assessment [47], [85], etc), the retrospective object level analysis by dynamic grid segmentation can be computationally expensive and subjected to some data association errors.) , and to obtain a better understanding of the observed dynamic scenes through the introduction of an additional object level into the model. The new framework, whose development has been continued in 2016, is called Conditional Monte Carlo Dense Occupancy Tracker (CMCDOT) [84]. The whole CMCDOT framework and its results are presented and explained on a video posted on Youtube (https://www.youtube.com/watch?v=uwIrk1TLFiM). This work has mainly been performed in the scope of the project Perfect of IRT Nanoelec (Nanoelec Technological Research Institute (Institut de Recherche Technologique Nanoelec)) (financially supported by the French ANR agency (National Research Agency (Agence Nationale de la recherche))), and also used in the scope of our long-term collaboration with Toyota.
In 2016, most of the efforts have been focused on the optimization of the implementation of our grid-based Bayesian filtering CMCDOT framework. Since the beginning of the development of this framework, we have chosen to construct models and algorithms specially designed to attain real-time performances on embedded devices, through a massively parallelization of the involved processes. The whole system have been implemented and scrupulously optimized in Cuda, in order to fully benefit from the Nvidia GPUs and technologies. Starting from the use of the Titan X and GTX980 GPUs (the hardware used in our computers and experimental platforms), we have successfully adapted and transferred our whole real-time perception chain on Nvidia dedicated-to-automotive cards Jetson K1 and X1 (These new Nvidia devices are more suited for embedded applications, in term of power consumption and dimensions.). A specific optimization has been performed in term of data access and processing, allowing us to obtain real-time results when processing the data from the 8 lidar layers generated by our IBEO sensors, by using a grid containing 1400x600 cells and 65536 dynamic particles (for motion estimation). The observation grid generation and fusion (representing the input of the CMCDOT) is made in 17ms on Jetson K1 and only in 0.7ms on Jetson X1; a CMCDOT filtering update is performed in 70ms on Jetson K1 and only in 17ms on Jetson X1.

|
A new sensor model for 3D sensors, by Ground Estimation, Data segmentation and adapted Occupancy Grid construction
Participants : Lukas Rummelhard, Amaury Nègre, Anshul Paigwar, Christian Laugier.
As a starting point for the Bayesian perception framework embedded on the vehicles and on the perception boxes, the system generates instantaneous spatial occupancy grids, by interpreting the point clouds generated by the sensors (sensor model). With planar sensors, placed at the level of the wanted occupancy grid, such as the IBEO Lidar on the vehicles or the Hokuyo Lidar on the first developed perception box, a classic sensor model can be used: before the laser impact the space is considered as empty, occupied at the impact point and undefined after the impact. In our previous approach, the angular differences between the 4 laser layers of our IBEO Lidars was taken into account by introducing a confidence factor in the data, reducing in this way the effect of the impacts too close to the ground. In this approach the ground is assumed to be flat and the confidence factor is calculated geometrically. Then, given the orientation of these sensors and the environments traversed, such a model was quite satisfactory.
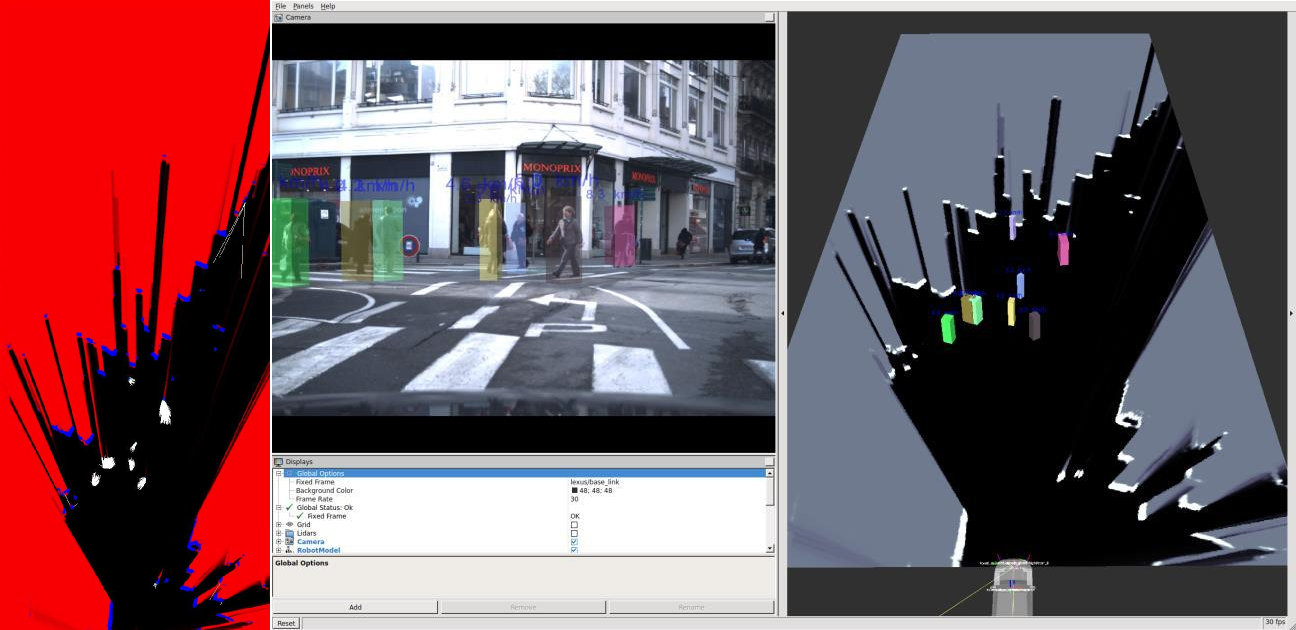
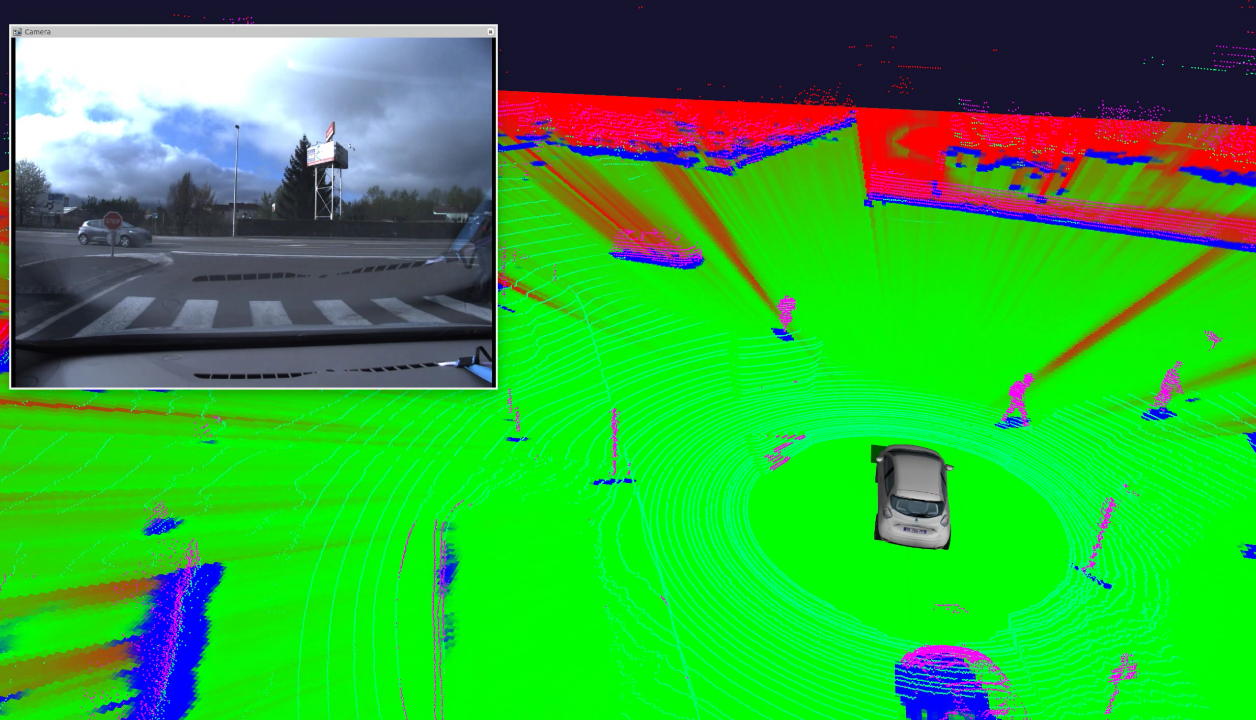
However, this traditional sensor model has to be adapted when using Velodyne or Quanergy sensors mounted on the top of the vehicle and providing dense 3D data with a high horizontal and vertical resolution. Indeed, in this case the laser layers are capable of depicting an obstacle from above, and consequently an impact at a given distance does not certify any more a free area until the impact. Moreover, many impact points are located on the ground and have to be appropriately modeled in order to systematically avoid deceptive obstacle detection. Then, the previous flat-ground assumption doesn’t hold anymore, since the actual ground shape is integrated into the data and the correct segmentation of obstacle becomes critical in the process. This is why we have developed the new Ground Estimator approach.
The aim of the method is, upstream from the Bayesian filtering step of our current perception system (CMCDOT), to first dynamically estimate the ground elevation, to exploit this information for making a relevant data classification between actual obstacle impacts and ground impacts, and finally to generate the relevant occupancy grid using this classified 3D point cloud (sensor model). The developed method is based on a recursive spatial and temporal filtering of a Bayesian network of elevation nodes, constantly re-estimated and re-evaluated with respect to data and spatial continuity. The construction of the occupancy grid is based, on the one hand, on the location of the laser impacts, and on the other hand on the shape of the ground and the height at which the lasers pass through the different portions of the space.
The approach has been first successfully tested and validated with dense Lidar sensors (Velodyne and Quanergy). The use of the enhanced sensor model is also currently tested with sparser sensors, with the objective to increase their robustness. The obtained results show promising perspectives, offering a robust and efficient ground representation, data segmentation and relevant occupancy grid, and also offering quality inputs for the next steps of the perception framework. A journal paper and a patent are under preparation.
|

Dense & Robust outdoor perception for autonomous vehicles
Participants : Victor Romero-Cano, Christian Laugier.
Robust perception plays a crucial role in the development of autonomous vehicles. While perception in normal and constant environmental conditions has reached a plateau, robust perception in changing and challenging environments has become an active research topic, particularly due to the safety concerns raised by the introduction of self-driving cars to public streets. In collaboration with Toyota Motors Europe and starting in April 2016 we have developed techniques that tackle the robust-perception problem by combining multiple complementary sensor modalities.
Our techniques, similar to those presented in [78], [91] explore the complementary relationships between passive and active sensors at the pixel level. Low-level sensor fusion allows for an effective use of raw data in the fusion process and encourages the development of recognition systems that work directly on multi-modal data rather than higher level estimates. During the last nine months we have developed low-level sensor fusion approaches that, differently from most of the related literature, do not have fixed requirements regarding coverage or density of the active sensors. This provides a competitive advantage due to the elevated costs of dense range sensors such as Velodyne LIDARs.
Our framework outputs a new image-like data representation where each pixel contains not only colour but also other low level features such as depth and regions of interest where generic objects are likely to be. Our approach is generic so it allows for the integration of data coming from any active sensor into the image space. Additionally, it does not aim at tackling the object detection problem directly but it proposes a multi-modal-data representation from which object detection methods may benefit. For evaluation purposes we have tackled the concrete problem of fusing color images and sparse lidar returns, however, as explained before, the framework is amenable for the inclusion of any other range-sensor modality. The framework creates XDimages by extrapolating range measurements across the image space in a two-stage procedure. The first stage considers locally homogeneous areas given by a super-pixel segmentation while the second one further expands depth values by performing self-supervised segmentation of areas seeded by the range sensor. The framework's pipeline is illustrated in Figure 8.
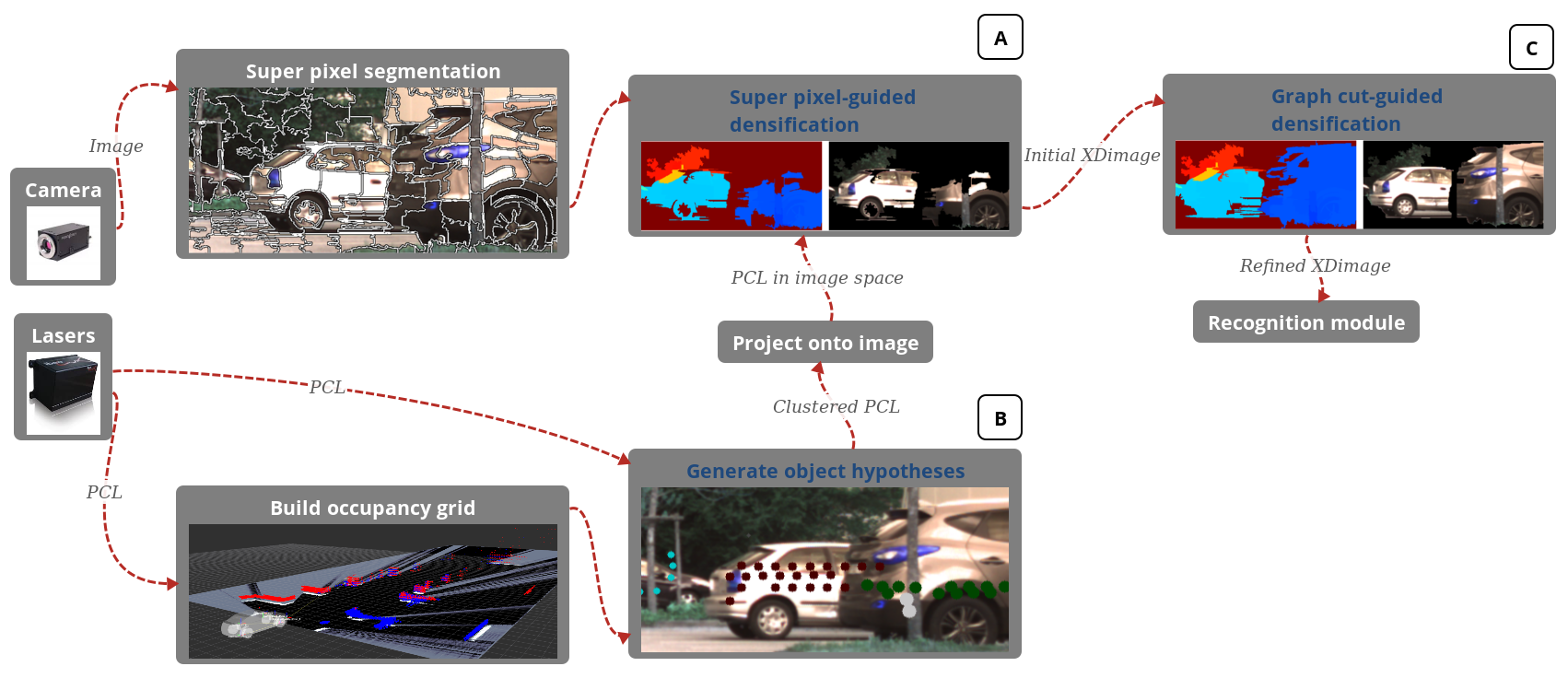
We have named an instance of our data structure an XDimage. It corresponds to an augmented camera image where individual pixels contain both appearance and geometric information. The first and more challenging problem to be solved in order to build XDimages is that of densifying sparse point cloud data provided by active range sensors. In our approach we extrapolated depth information using a two-steps procedure as follows:
-
Extend depth values projected onto individual pixels to neighbouring pixels that have similar appearance.
-
For each geometry-based object hypothesis, extrapolate range measurements in order to account for entire objects.
The results of this work have resulted in a patent application [82] and a paper submission to ICRA 2017 [83].
Integration of Bayesian Perception System on Embedded Platforms
Participants : Tiana Rakotovao, Christian Laugier, Diego Puschini [CEA DACLE] , Julien Mottin [CEA DACLE] .
Perception is a primary task for an autonomous car where safety is of utmost importance. A perception system builds a model of the driving environment by fusing measurements from multiple perceptual sensors including LIDARs, radars, vision sensors, etc. The fusion based on occupancy grids builds a probabilistic environment model by taking into account sensor uncertainties. Our objective is to integrate the computation of occupancy grids into embedded low-cost and low-power platforms. Occupancy Grids perform though intensive probability calculus that can be hardly processed in real-time on embedded hardware.
As a solution, we introduced a new sensor fusion framework called Integer Occupancy Grid [80]. Integer Occupancy Grids rely on a proven mathematical foundation that enables to process probabilistic fusion through simple addition of integers. The hardware/software integration of integer occupancy grids is safe and reliable. The involved numerical errors are bounded and parameterized by the user. Integer Occupancy Grids enable a real-time computation of multi-sensor fusion on embedded low-cost and low-power processing platforms dedicated for automotive applications. This research work has been conducted in the scope of the PhD thesis of Tiana Rakotovao, which will be defended in February 2017.

Experiences showed that Integer Occupancy Grids enable the real-time fusion of the four ibeo LUX LIDARs mounted on the ZOE experimental platform of IRT Nano-Elec [79]. The LIDARs produces about 80,000 points at 25Hz. These points are fused in real-time through a hardware/software integration of the Integer Occupancy Grid framework on an embedded CPU based on ARM A9@1GHz. The platform respects the low-cost and low-power constraints of processing hardware used for automotive. The fusion produces an occupancy grid at more than 25 Hz as illustrated on figure 9.
Embedded and Distributed Perception
Participants : Christian Laugier, Julia Chartes, Amaury Nègre, Lukas Rummelhard, Jean-Alix David, Jerome Lussereau, Nicolas Turro [SED] , Jean-Francçois Cuniberto [SED] .
Embedded Perception in an Experimental Vehicle Renault ZOE
In the scope of the Perfect project of the IRT nanoelec, we have started to build an experimental platform using a Renault Zoe equipped with several types of sensors (see 2014 and 2015 annual activity reports). The platform includes multiple sensors, an embedded perception system based on the CMCDOT, and a collision risk component, figure 10(a) illustrates.
|
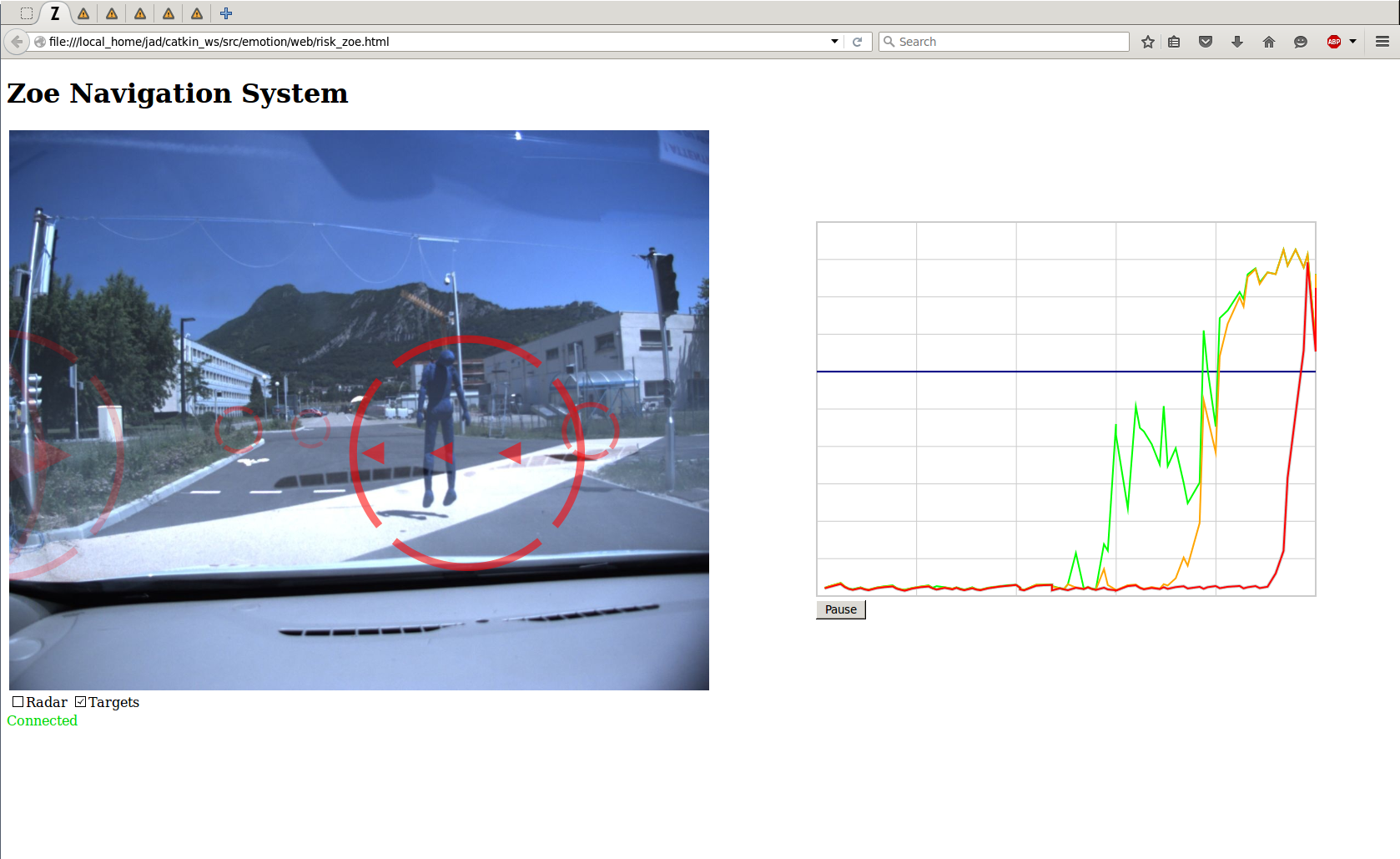


In 2016, we have continued to develop and to improve the platform using the latest version of the CMCDOT, some optimized perception and localization components, and new V2X communication functions for distributed perception.
In particular, we have developed an improved the localization function using maps and V2X communication devices. We also developed a new embedded component for sharing data between the infrastructure perception boxes and the vehicle; this component is based on the use of V2X communication and GPS time synchronization. This is a first step towards a fully distributed perception system. The development of this system will be continued in 2017 (see next section).
During the year 2016, experiments have been pushed forward on testing the perception algorithms, the collision risk alert and the localization components using a fabric mannequin as shown on figure 10(b). The mannequin has been motorized for easier and more realistic tests and demos. More details are given in the team publications at MCG 2016 [29] and at GTC Europe 2016. The work of the team is also explained on youtube videos "Irt Nanoelec Perfect Project" [55] and for the technical side "Bayesian Embedded Perception" [54].
New experiments have also been performed on some road intersections and highways, in order to collect new data on driver’s behaviors. These experiments have been conducted on mountain roads with changing slopes and on highway (to study the lane changing behaviors). They have been performed in the scope of our cooperation with Renault and with Toyota. The way these experimental data have been used is described in the section “Situation Awareness”. More recently, we have also started to work on the development of the automatic driving controls on the Zoe vehicle. For that purpose, we have recently signed a cooperation agreement with Ecole Centrale de Nantes. The basic functions for automatic driving will be implemented on the Zoe at the beginning of 2017. For that purpose, a physical model of the Zoe is currently in construction under ROS Gazebo simulator. This should allow us to implement and to test the required control laws.
Distributed Perception
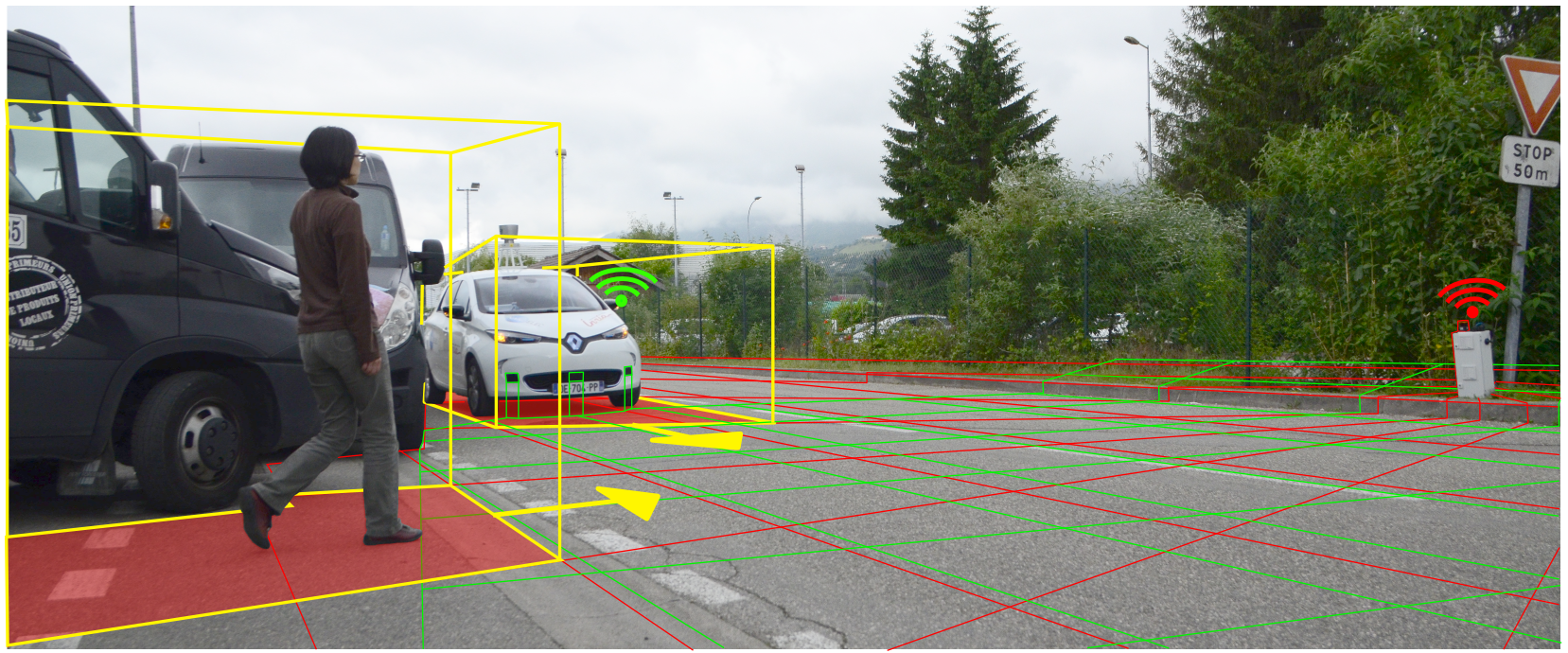
In 2015, we have developed a first Connected Perception Box including a GPS, a V2X communication device, a cheap Lidar sensor, and an Nvidia Tegra K1 board. The box was powered using a battery, and the objective was to reduce as far as possible the required energy consumption. Within the box, the perception process is performed using the CMCDOT algorithm. In 2016, we have continued to develop this concept of distributed perception. We have developed a second generation of the perception box, using a Quanergy M8 360 Lidar, a TX1 Nvidia Tegra board, an ITRI V2X communication device and the last version of the CMCDOT system. This new box is more efficient and powerful than the previous one. It allows the real-time exchange of objects positions and velocities, through a V2X communication between the perception box and the connected vehicle. This leads to the extension of the vehicle perception area to some hidden areas, and to generate some alerts in case of a high collision risk, cf. fig. 11. In this approach, time synchronization has been performed using GPS time and NTP protocol.
Public demonstrations and Technological Transfer
2016 has been a year with many scientific events and public demos. Several public demonstrations of our experimental vehicle have performed, some of them in presence of local government officials during a GIANT show at CEA.
The collaboration with Nvidia on Embedded Perception for autonomous driving has been extended to 2017, and the "GPU research center" label has been renewed.
Toyota Motor Europe (TME) is strongly interested in the CMCDOT technology, and Inria is currently negotiating with them the conditions of a first licence for R&D purpose. A first implementation of the executable code of CMCDOT has successfully been implemented on the TME experimental vehicle in Brussels. We are currently discussing with TME an extension of the license to several other experimental vehicles located in some other places in the world.
At the end of 2016, we also started to transfer the CMCDOT technology to two industrial companies in the fields of industrial mobile robots and automatic shuttles. Confidential contracts for the joint development of proofs of concepts are under signing. The work will be performed at the beginning of 2017.